Autonomous Navigation at Toshiba Research
Published:
Generalized embodied navigation models, trained on ground robots that seamlessly transfer to aerial robots

Published:
Generalized embodied navigation models, trained on ground robots that seamlessly transfer to aerial robots
Published:
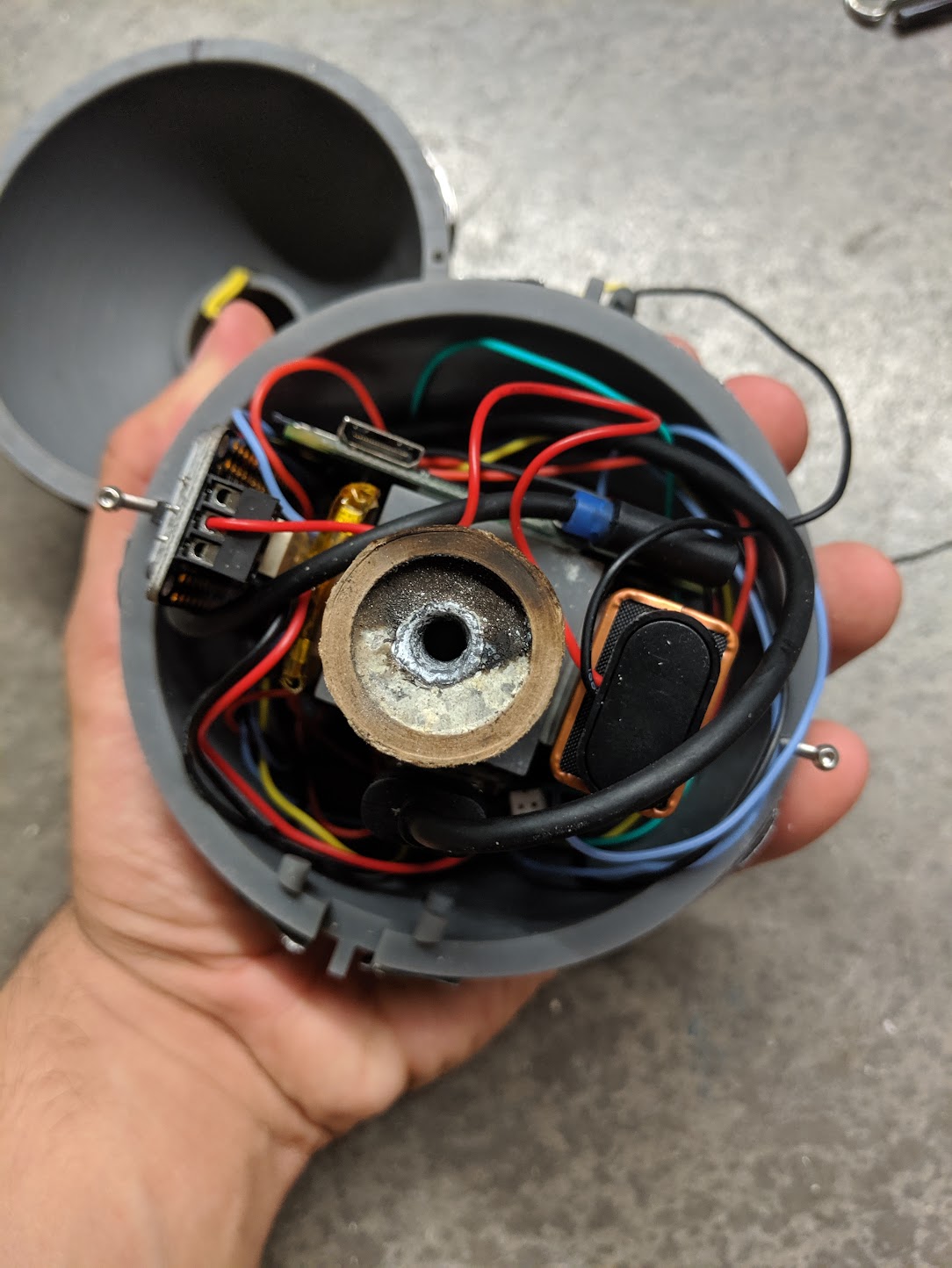
The spinning projectile extreme environment robot